Hough Transform
Formulation
Converting image space to parameter space
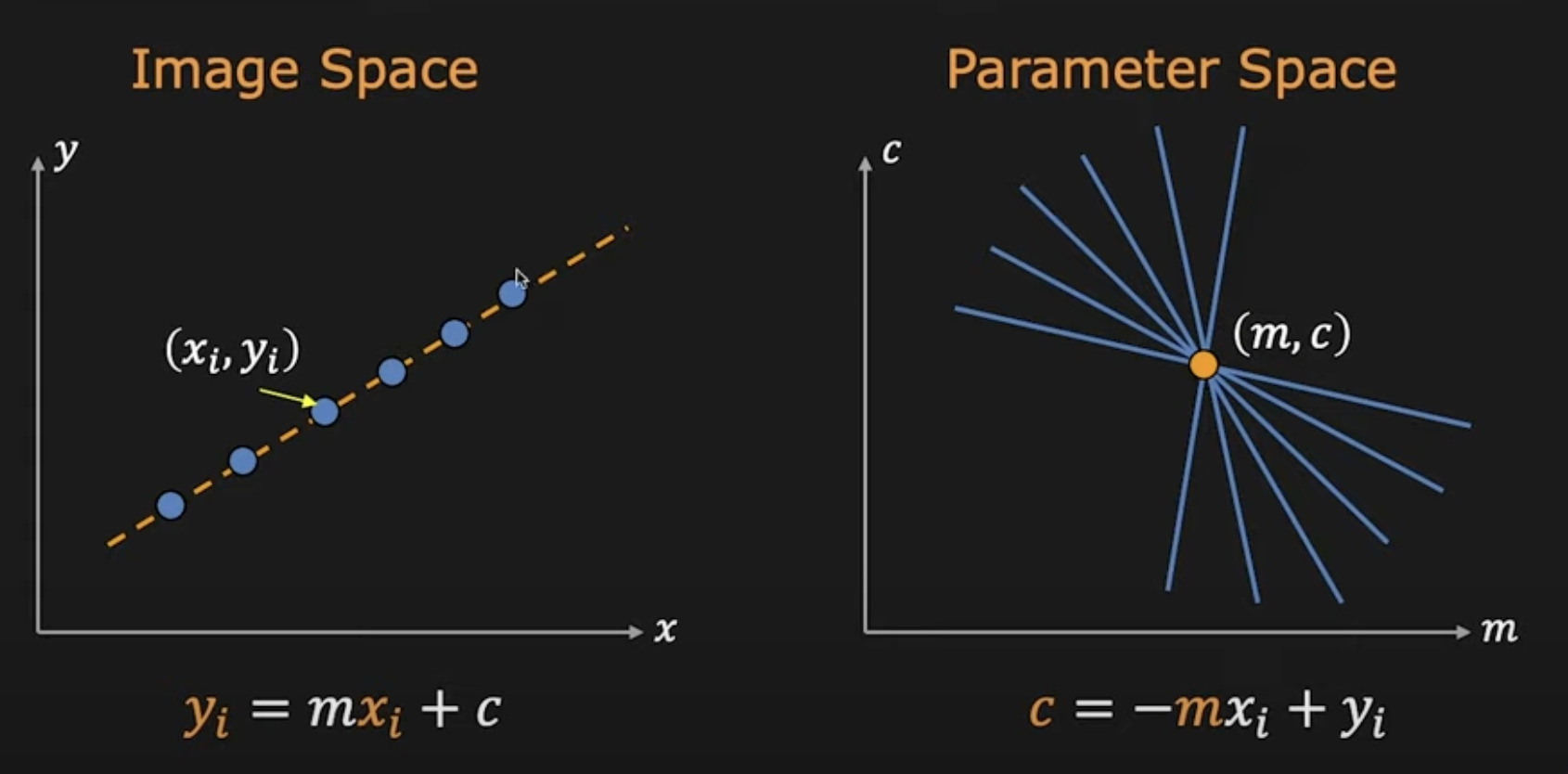
In the following example, a line in image space is given by equation
where is slope, and is y-intercept
Rearranging the terms we get
Above equation is also an equation of line, with slop and y-intercept
- A line in (x,y) domain (image space) changes to a point in parameter space (m,c)
- A point in (x,y) domain (image space) changes to a line in parameter space (m,c)
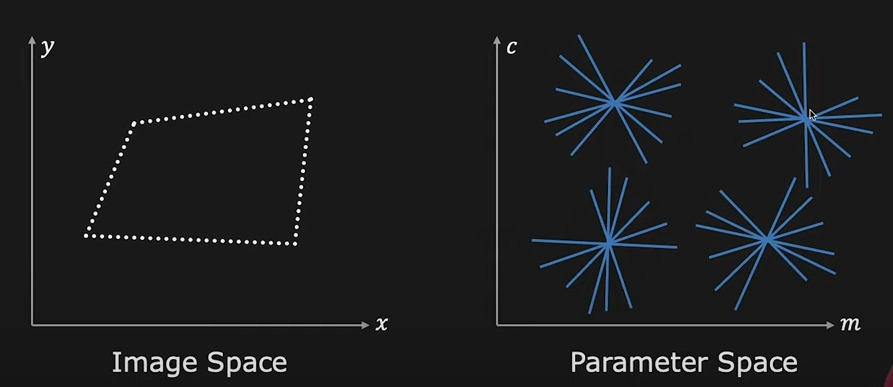
This transform can be used to:
- Detect points in image space which are on the same line
- Border detection
In following image, the 4 points in parameter space correspond to 4 lines in Image Space, while each concurrent line in parameter space corresponds to each point in image space.
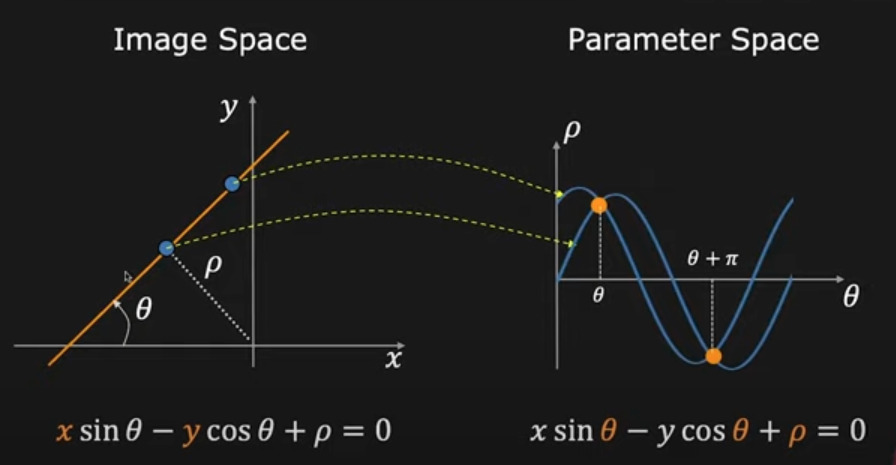
Issue Using Slope as parameter
Slope of the line () can be between ( when line in image space is vertical)
Its not possible to represent infinity (or even such large values) in computer
More memory and computation required
Using radius and orientation as parameters
Represent the line in Image Space as
Here, Orientation () is finite:
Perpendicular distance from origin () is finite (can not be greater than size of the image itself)
Hough Transform Mechanics
Accumulator Array: A discrete matrix in parameter space, used to map the array
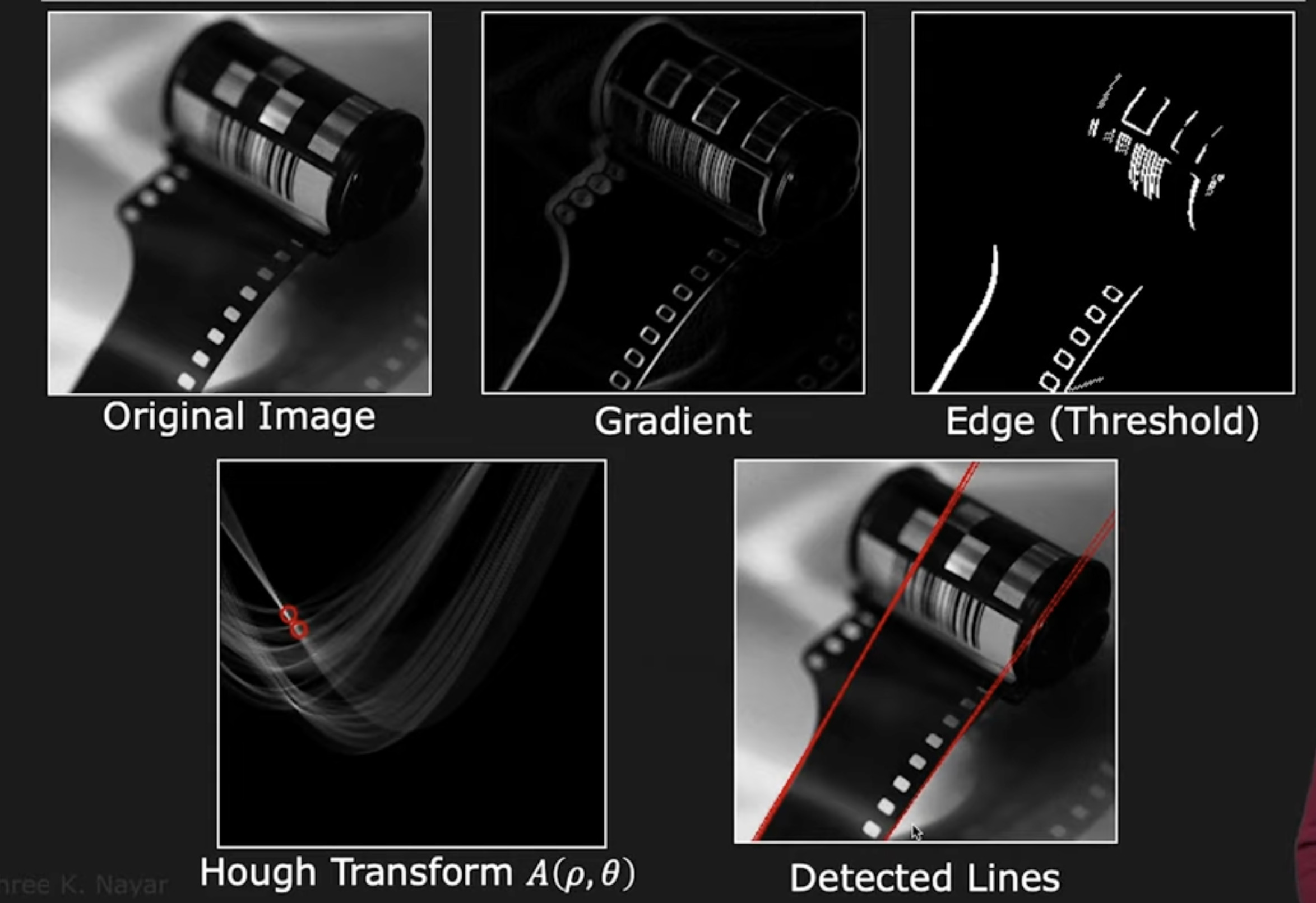
Here is example of real image processed with Hough Transform.
NOTE: Hough transform can only be used to know the exact location of the edges in the input image. In below example, Edge detection (with threshold) is performed on the Original Image, then it is passed to Hough Transform.
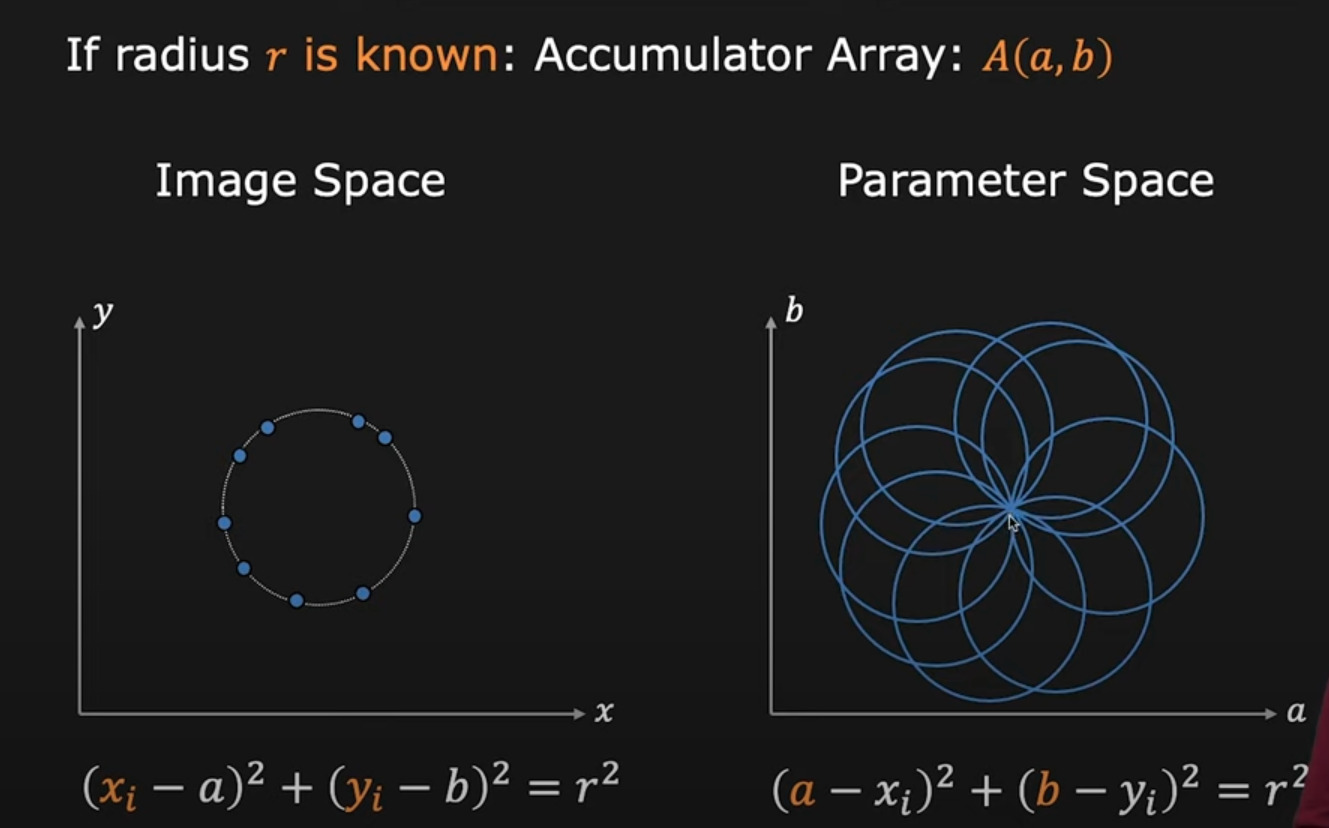
Hough Transform: Circle Detection
Similar to line detection
- A circle in (x,y) domain (image space) changes to a point in parameter space (m,c)
- A point in (x,y) domain (image space) changes to a circle in parameter space (m,c)
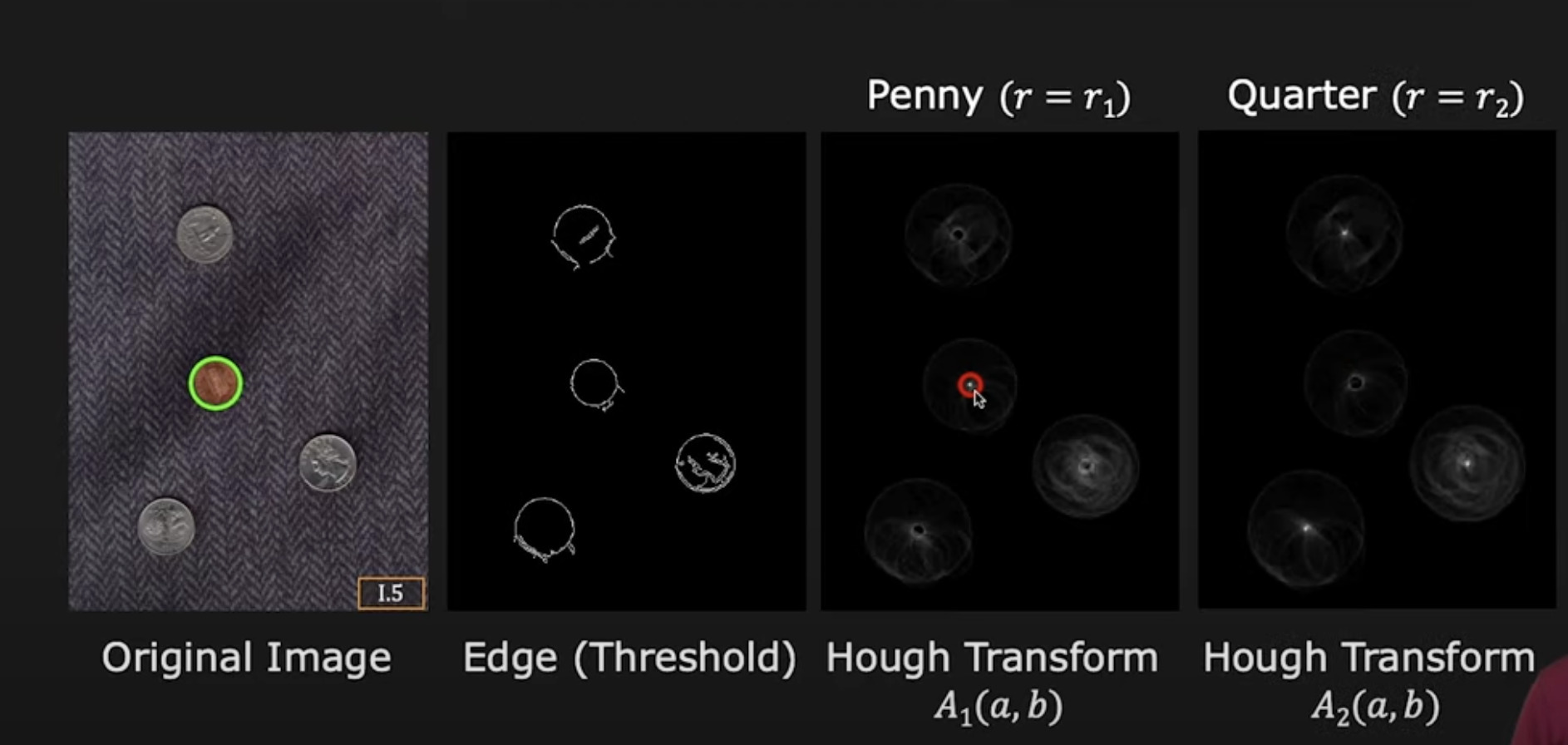
Using Gradient Information in Circle Detection
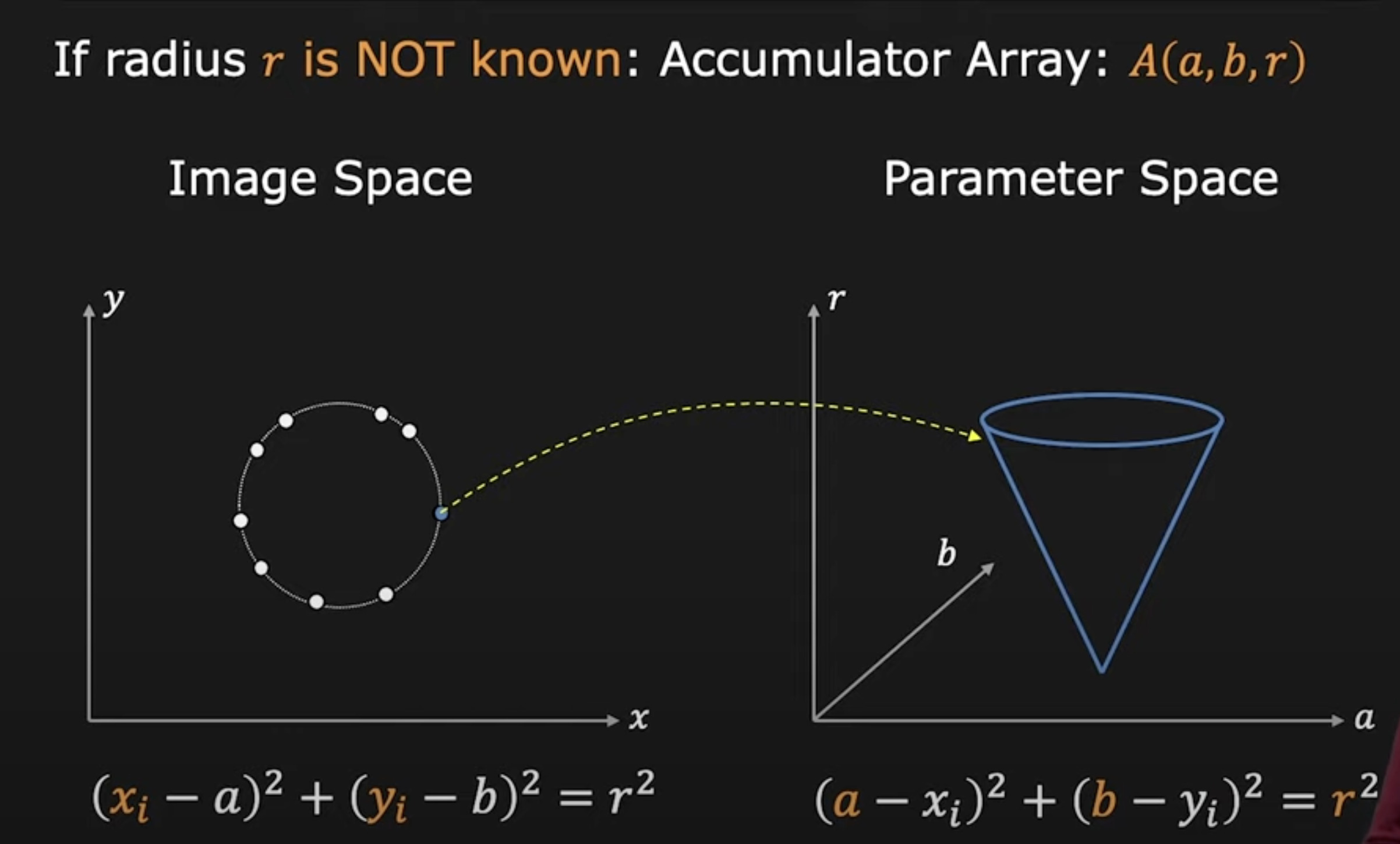
Circle Detection when Radius is unknown
In this case, in parameter space there are 3 unknown variables: a , b and r
Rolling Hough Transform
Performing Hough Transform over a large image, on a rolling window ( similar to convolution, or sliding median )
This is very computationally heavy operation, because of rolling window, but can be parallelised using GPU